19.07.2023
نحوه جدا کردن موتور از سروو سرووهای آردوینو SG90، MG995، MG996: نمودار اتصال و کنترل
ساده ترین ربات ها 2 چرخ یا 4 چرخ هستند. چنین روباتی میتواند بر پایه شاسی یک ماشین رادیویی باشد، اما ممکن است همه آن را در دسترس نداشته باشند یا هدر دادن آن شرم آور باشد. شما همچنین می توانید شاسی را خودتان بسازید، اما قرار دادن چرخ ها به طور مستقیم روی موتور کار چندانی نیست تصمیم خوب، موتور باید کند شود ، برای این کار به گیربکس نیاز دارید. به دست آوردن یک شاسی یا گیربکس آماده یا یک موتور با گیربکس، برخلاف سرووها، کار چندان آسانی نیست. تقریباً هر سروو درایو را می توان به راحتی با گیربکس به موتور تبدیل کرد.
چرخ ها را می توان مستقیماً به راکر چنین موتوری چسباند و بدنه سروو برای نصب راحت است.
توجه! طراحی سرووهای دیگر ممکن است متفاوت باشد، و بنابراین، این راهنما فقط جزئی است.
ساده ترین و ارزان ترین سروو به عنوان پایه در نظر گرفته شد:

اول، بیایید آن را جدا کنیم.

ابتدا وسایل الکترونیکی غیر ضروری را جدا می کنیم، درایور را گاز می گیریم و مستقیماً موتور را کنترل می کنیم. در مرحله بعد، بیایید به اصلاح مکانیک ادامه دهیم، دنده اول را با شفت خارجی برداریم و توقف حرکت را از روی آن برداریم.



مقاومت را بیرون می آوریم و محدود کننده ای که روی بدنه آن قرار دارد را گاز می گیریم.

همه مکانیک ها را دوباره کنار هم قرار می دهیم و بررسی می کنیم که همه چیز به خوبی حرکت کند.
مرحله بعدی لحیم کردن سیم به موتور است.

ما سروو قبلی را در یک موتور جدید با گیربکس مونتاژ می کنیم.
همه چیز آماده است، اگر هیچ اشتباهی مرتکب نشده اید، می توانید از کار خود لذت ببرید.
این مقاله سرووها را مورد بحث قرار می دهد: طراحی، هدف، نکاتی در مورد اتصال و کنترل، انواع سرووها و مقایسه آنها. بیایید جلو برویم و با چیستی سروو شروع کنیم.
مفهوم سروو
درایو سروو اغلب به عنوان مکانیزمی با یک موتور الکتریکی شناخته می شود که می توان از آن خواست تا به یک زاویه معین بچرخد و این موقعیت را نگه دارد. با این حال، این یک تعریف کاملاً کامل نیست.
به بیان دقیق تر، درایو سروو درایوی است که از طریق بازخورد منفی کنترل می شود و امکان کنترل دقیق پارامترهای حرکت را فراهم می کند. سروو درایو به هر نوع درایو مکانیکی گفته می شود که شامل یک سنسور (موقعیت، سرعت، نیرو و غیره) و یک واحد کنترل درایو است که به طور خودکار پارامترهای لازم را بر روی سنسور و دستگاه با توجه به مقدار خارجی داده شده حفظ می کند.
به عبارت دیگر:
سروو درایو مقدار پارامتر کنترل را به عنوان ورودی دریافت می کند. به عنوان مثال، زاویه چرخش.
واحد کنترل این مقدار را با مقدار سنسور خود مقایسه می کند.
بر اساس نتیجه مقایسه، درایو اقداماتی را انجام می دهد: به عنوان مثال، چرخش، شتاب یا کاهش سرعت به طوری که مقدار سنسور داخلی تا حد امکان به مقدار پارامتر کنترل خارجی نزدیک شود.
رایج ترین سرووهایی هستند که یک زاویه مشخص را نگه می دارند و سرووهایی که سرعت چرخش معینی را حفظ می کنند.
یک سروو سرگرمی معمولی در زیر نشان داده شده است.
سرووها چگونه طراحی می شوند؟
دستگاه سروو درایو
درایوهای سروو دارای اجزای مختلفی هستند.

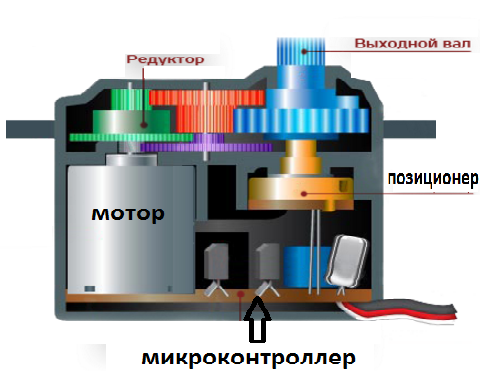
درایو - موتور الکتریکی با گیربکس. برای تبدیل برق به چرخش مکانیکی، شما نیاز دارید موتور الکتریکی. با این حال، سرعت چرخش موتور اغلب برای استفاده عملی بسیار زیاد است. برای کاهش سرعت استفاده می شود گیربکس: مکانیزم چرخ دنده ای که گشتاور را منتقل و تبدیل می کند.
با روشن و خاموش کردن موتور الکتریکی، میتوانیم شفت خروجی را بچرخانیم - چرخ دنده نهایی سروو، که میتوانیم چیزی را که میخواهیم کنترل کنیم به آن وصل کنیم. اما برای اینکه موقعیت توسط دستگاه کنترل شود، لازم است سنسور بازخورد - رمزگذارکه زاویه چرخش را دوباره به سیگنال الکتریکی تبدیل می کند. اغلب برای این کار از پتانسیومتر استفاده می شود. هنگامی که نوار لغزنده پتانسیومتر را می چرخانید، مقاومت آن متناسب با زاویه چرخش تغییر می کند. بنابراین، می توان از آن برای تعیین موقعیت فعلی مکانیسم استفاده کرد.
سروو علاوه بر موتور الکتریکی، گیربکس و پتانسیومتر، دارای قطعات الکترونیکی است که وظیفه دریافت پارامتر خارجی، خواندن مقادیر از پتانسیومتر، مقایسه آنها و روشن/خاموش کردن موتور را بر عهده دارند. او مسئول حفظ بازخورد منفی است.
سه سیم به سروو می رود. دو نفر از آنها وظیفه تغذیه موتور را بر عهده دارند، سومی سیگنال کنترلی را ارائه می دهد که برای تنظیم موقعیت دستگاه استفاده می شود.
حالا بیایید ببینیم که چگونه یک سروو را به صورت خارجی کنترل کنیم.
کنترل درایو سروو رابط سیگنال کنترل
برای نشان دادن موقعیت مورد نظر به سروموتور، باید یک سیگنال کنترلی در طول سیمی که برای این منظور در نظر گرفته شده ارسال شود. سیگنال کنترل، پالس هایی با فرکانس ثابت و عرض متغیر است.

اینکه سروو باید چه موقعیتی بگیرد به طول پالس ها بستگی دارد. هنگامی که یک سیگنال وارد مدار کنترل می شود، مولد پالس موجود در آن پالس خود را تولید می کند که مدت زمان آن از طریق یک پتانسیومتر تعیین می شود. قسمت دیگر مدار مدت زمان دو پالس را مقایسه می کند. اگر مدت زمان متفاوت باشد، موتور الکتریکی روشن می شود. جهت چرخش مشخص می شود که کدام یک از پالس ها کوتاهتر است. اگر طول پالس برابر باشد، موتور الکتریکی متوقف می شود.
اغلب سرورهای سرگرمی پالس هایی با فرکانس 50 هرتز تولید می کنند. این بدان معناست که هر 20 میلی ثانیه یک بار یک پالس منتشر و دریافت می شود. به طور معمول، مدت زمان پالس 1520 میکرو ثانیه به این معنی است که سروو باید موقعیت وسط را بگیرد. افزایش یا کاهش طول پالس باعث چرخش سروو به ترتیب در جهت عقربه های ساعت یا خلاف جهت عقربه های ساعت می شود. در این مورد، محدودیت های بالا و پایین در مدت زمان پالس وجود دارد. در کتابخانه Servo برای آردوینو، طول پالس های زیر به طور پیش فرض تنظیم شده است: 544 میکرو ثانیه برای 0 درجه و 2400 میکرو ثانیه برای 180 درجه.
لطفاً توجه داشته باشید که دستگاه خاص شما ممکن است تنظیمات پیش فرض کارخانه را نداشته باشد. برخی از سرووها از عرض پالس 760 میکرو ثانیه استفاده می کنند. موقعیت وسط مربوط به 760 میکروثانیه است، مشابه آنچه در سرووهای معمولی موقعیت وسط با 1520 میکروثانیه مطابقت دارد.
همچنین شایان ذکر است که این طول ها فقط به طور کلی پذیرفته شده اند. حتی در همان مدل سروو، ممکن است تلورانس های تولیدی وجود داشته باشد که باعث می شود محدوده عملیاتی طول پالس کمی متفاوت باشد. برای عملکرد دقیق، هر سرووی خاص باید کالیبره شود: از طریق آزمایش، لازم است محدوده صحیح مخصوص آن را انتخاب کنید.
نکته دیگری که ارزش توجه به آن را دارد، سردرگمی در اصطلاحات است. اغلب روش کنترل سرووها PWM/PWM (مدولاسیون عرض پالس) یا PPM (مدولاسیون موقعیت پالس) نامیده می شود. این درست نیست و استفاده از این روش ها حتی ممکن است به درایو آسیب برساند. اصطلاح صحیح PDM (Pulse Duration Modulation) است. در آن طول پالس ها اهمیت فوق العاده ای دارد و دفعات وقوع آنها چندان مهم نیست. 50 هرتز طبیعی است، اما سروو در هر دو فرکانس 40 و 60 هرتز به درستی کار می کند. تنها چیزی که باید در نظر داشته باشید این است که اگر فرکانس به شدت کاهش یابد، می تواند به صورت ناگهانی و با قدرت کاهش یافته کار کند و اگر فرکانس به شدت افزایش یابد (مثلا 100 هرتز)، ممکن است بیش از حد گرم شود و از کار بیفتد.
ویژگی های سروو درایو
حالا بیایید بفهمیم که چه نوع سرووهایی وجود دارد و چه ویژگی هایی دارند.
گشتاور و سرعت نوسان
ابتدا اجازه دهید در مورد دو ویژگی بسیار مهم یک سروو درایو صحبت کنیم: o گشتاورو در مورد سرعت چرخش.
گشتاور نیرو یا گشتاور یک کمیت فیزیکی برداری است برابر حاصلضرب بردار شعاع کشیده شده از محور چرخش تا نقطه اعمال نیرو و بردار این نیرو. عملکرد چرخشی یک نیرو بر روی جسم جامد را مشخص می کند.

به زبان ساده، این مشخصه نشان میدهد که سروو چقدر بار سنگینی را میتواند روی یک اهرم با طول معین نگه دارد. اگر گشتاور سروو درایو 5 کیلوگرم × سانتی متر باشد، به این معنی است که سروو درایو اهرمی به طول 1 سانتی متر را که در انتهای آزاد آن 5 کیلوگرم آویزان است، در حالت افقی نگه می دارد. یا به طور معادل اهرمی به طول 5 سانتی متر که 1 کیلوگرم از آن آویزان است.
سرعت سروو با مدت زمانی که طول می کشد تا بازوی سروو 60 درجه بچرخد اندازه گیری می شود. مشخصه 0.1 ثانیه / 60 درجه به این معنی است که سروو در 0.1 ثانیه 60 درجه می چرخد. محاسبه سرعت در یک مقدار آشناتر، دور در دقیقه آسان است، اما این اتفاق می افتد که هنگام توصیف سرووها، اغلب از چنین واحدی استفاده می شود.
شایان ذکر است که گاهی اوقات بین این دو ویژگی معاوضه وجود دارد، زیرا اگر یک سرووی قابل اعتماد و سنگین می خواهیم، باید آماده چرخش آرام این واحد قدرتمند باشیم. و اگر بخواهیم یک درایو بسیار سریع داشته باشیم، خارج کردن آن از موقعیت تعادل نسبتاً آسان خواهد بود. هنگام استفاده از یک موتور، تعادل با پیکربندی چرخ دنده ها در جعبه دنده تعیین می شود.
البته، ما همیشه می توانیم واحدی را بگیریم که توان بیشتری مصرف می کند، نکته اصلی این است که ویژگی های آن نیازهای ما را برآورده کند.
فاکتور فرم
سرووها از نظر اندازه متفاوت هستند. و اگرچه هیچ طبقه بندی رسمی وجود ندارد، تولید کنندگان مدت هاست که به چندین اندازه با ترتیب پذیرفته شده اتصال دهنده ها پایبند هستند. آنها را می توان به موارد زیر تقسیم کرد:
کم اهمیت
استاندارد
آنها دارای ابعاد مشخصه زیر هستند:
سرووهای به اصطلاح "نوع خاص" نیز با ابعادی وجود دارند که در این طبقه بندی قرار نمی گیرند، اما درصد چنین سرووهایی بسیار کم است.
رابط داخلی
درایوهای سروو یا آنالوگ یا دیجیتال هستند. پس تفاوت ها، مزایا و معایب آنها چیست؟
از نظر خارجی، آنها تفاوتی ندارند: موتورهای الکتریکی، گیربکس ها، پتانسیومترها یکسان هستند، آنها فقط در الکترونیک کنترل داخلی متفاوت هستند. به جای یک ریز مدار سروو آنالوگ خاص، همتای دیجیتال یک ریزپردازنده روی برد دارد که پالس ها را دریافت می کند، آنها را تجزیه و تحلیل می کند و موتور را کنترل می کند. بنابراین در طراحی فیزیکی تنها تفاوت در روش پردازش تکانه ها و کنترل موتور است.

هر دو نوع سروو درایو پالس های کنترلی یکسانی را می پذیرند. سپس سروو آنالوگ تصمیم می گیرد که آیا موقعیت را تغییر دهد و در صورت لزوم سیگنالی را به موتور ارسال می کند. این معمولا با فرکانس 50 هرتز اتفاق می افتد. بنابراین، ما 20 میلی ثانیه - حداقل زمان واکنش را دریافت می کنیم. در این زمان، هر گونه تأثیر خارجی می تواند موقعیت درایو سروو را تغییر دهد. اما این تنها مشکل نیست. در حالت استراحت، هیچ ولتاژی به موتور الکتریکی اعمال نمی شود، در صورت انحراف جزئی از تعادل، یک سیگنال کوتاه کم مصرف به موتور الکتریکی ارسال می شود. هر چه انحراف بیشتر باشد، سیگنال قوی تر است. بنابراین، با انحرافات کوچک، درایو سروو نمی تواند به سرعت موتور را بچرخاند یا گشتاور زیادی ایجاد کند. "مناطق مرده" در زمان و فاصله تشکیل می شوند.
این مشکلات با افزایش فرکانس دریافت، پردازش سیگنال و کنترل موتور الکتریکی قابل حل است. سرووهای دیجیتال از یک پردازنده ویژه استفاده می کنند که پالس های کنترلی را دریافت کرده، آنها را پردازش کرده و سیگنال هایی را با فرکانس 200 هرتز یا بیشتر به موتور ارسال می کند. به نظر می رسد که درایو سروو دیجیتال می تواند سریعتر به تأثیرات خارجی واکنش نشان دهد، سرعت و گشتاور مورد نیاز را به سرعت توسعه دهد، به این معنی که بهتر است یک موقعیت مشخص را نگه دارید، که خوب است. البته مصرف برق بیشتری هم دارد. همچنین، ساخت سرووهای دیجیتال دشوارتر است و بنابراین هزینه بسیار بیشتری دارد. در واقع، این دو معایب تمام معایبی است که سرووهای دیجیتال دارند. که در از نظر فنیآنها سرووهای آنالوگ را به سمت پایین کوبیدند.
مواد دنده
چرخ دنده های سروو از مواد مختلفی ساخته می شوند: پلاستیک، کربن، فلز. همه آنها به طور گسترده مورد استفاده قرار می گیرند، انتخاب بستگی به کاربرد خاص و ویژگی های مورد نیاز در نصب دارد.

دنده های پلاستیکی، اغلب نایلونی، بسیار سبک هستند، در معرض سایش نیستند و در سرووها رایج هستند. آنها بارهای سنگین را تحمل نمی کنند، اما اگر انتظار می رود بارها سبک باشند، دنده های نایلونی بهترین انتخاب هستند.
چرخ دنده های کربنی بادوام تر هستند، عملا فرسوده نمی شوند و چندین برابر نایلون قوی تر هستند. نقطه ضعف اصلی هزینه بالا است.
چرخ دنده های فلزی سنگین ترین هستند، اما می توانند حداکثر بار را تحمل کنند. آنها خیلی سریع فرسوده می شوند، بنابراین تقریباً هر فصل باید دنده ها را عوض کنید. چرخ دنده های تیتانیومی در میان چرخ دنده های فلزی و هر دو مورد علاقه هستند مشخصات فنی، و در قیمت. متأسفانه، آنها برای شما هزینه زیادی خواهند داشت.
موتورهای براش و براشلس
سه نوع سروو موتور وجود دارد: موتور هسته معمولی، موتور بدون هسته و موتور بدون جاروبک.

یک موتور هسته معمولی (سمت راست) دارای یک روتور آهنی متراکم با سیم پیچی و آهنربا در اطراف آن است. روتور دارای بخشهای متعددی است، بنابراین وقتی موتور میچرخد، روتور باعث میشود موتور با عبور قطعات از آهنربا کمی لرزش داشته باشد و در نتیجه سروویی ایجاد میشود که لرزش دارد و دقت کمتری نسبت به سروو با موتور بدون هسته دارد. موتور روتور توخالی (سمت چپ) دارای یک هسته مغناطیسی منفرد با یک سیلندر یا سیم پیچ زنگی شکل در اطراف آهنربا است. طراحی بدون هسته از نظر وزن سبک تر است و بدون بخش است و در نتیجه واکنش سریع تر و عملکرد صاف و بدون لرزش دارد. چنین موتورهایی گران تر هستند، اما بیشتر ارائه می دهند سطح بالاکنترل، گشتاور و سرعت در مقایسه با نمونه های استاندارد.

درایوهای سروو با موتورهای براشلس نسبتاً اخیراً ظاهر شده اند. مزایا مانند سایر موتورهای براشلس است: بدون برس، یعنی مقاومت چرخشی ایجاد نمی کنند و فرسوده نمی شوند، سرعت و گشتاور با مصرف جریانی برابر با موتورهای برس دار بالاتر است. سرووهای موتور بدون برس گران ترین سرووها هستند، اما آنها نیز ارائه می دهند بهترین ویژگی هادر مقایسه با سرووها با انواع دیگر موتورها.
اتصال به آردوینو
بسیاری از سرووها را می توان مستقیماً به آردوینو متصل کرد. برای انجام این کار، یک حلقه از سه سیم از آنها می آید:
قرمز - تغذیه؛ به پایه 5 ولت یا مستقیماً به منبع تغذیه متصل می شود
قهوه ای یا سیاه - زمین
زرد یا سفید - سیگنال؛ به خروجی دیجیتال آردوینو متصل می شود.
برای اتصال به آردوینو، استفاده از برد توسعه دهنده پورت مانند Troyka Shield راحت خواهد بود. اگرچه با چند سیم اضافی می توانید سروو را از طریق برد برد یا مستقیماً به پین های آردوینو متصل کنید.
این امکان وجود دارد که پالس های کنترلی را خودتان تولید کنید، اما این یک کار معمولی است که یک کتابخانه Servo استاندارد برای ساده کردن آن وجود دارد.
محدودیت های غذایی
یک سروو درایو معمولی در حین کار بیش از 100 میلی آمپر مصرف می کند. در عین حال، آردوینو قادر است تا 500 میلی آمپر را تحویل دهد. بنابراین، اگر نیاز به استفاده از درایو سروو قدرتمند در پروژه دارید، منطقی است که به جدا کردن آن در مداری با توان اضافی فکر کنید.
بیایید به مثال اتصال سروو درایو 12 ولت نگاه کنیم: 
محدودیت در تعداد سرووهای متصل
در اکثر بردهای آردوینو، کتابخانه Servo از کنترل بیش از 12 سروو پشتیبانی نمی کند؛ در آردوینو مگا، این تعداد به 48 افزایش می یابد. با این حال، مقدار کمی وجود دارد. اثر جانبیاستفاده از این کتابخانه: اگر با آردوینو مگا کار نمی کنید، استفاده از تابع analogWrite() روی پین های 9 و 10 غیرممکن می شود، صرف نظر از اینکه سرووها به این پین ها متصل هستند یا خیر. در آردوینو مگا میتوانیم تا 12 سروو را بدون اختلال در عملکرد PWM/PWM وصل کنیم، اگر از سرووهای بیشتری استفاده کنیم، نمیتوانیم از analogWrite() در پینهای 11 و 12 استفاده کنیم.
عملکرد کتابخانه سروو
کتابخانه Servo امکان کنترل نرم افزاری سرووها را فراهم می کند. برای این کار یک متغیر از نوع Servo ایجاد می شود. مدیریت با توابع زیر انجام می شود:
attach() - یک متغیر را به یک پین خاص متصل می کند. دو گزینه نحوی برای این تابع وجود دارد: servo.attach(pin) و servo.attach(pin، min، max). در این حالت پین تعداد پایهای است که درایو سروو به آن متصل است، حداقل و حداکثر طول پالس بر حسب میکروثانیه است که مسئول زوایای چرخش 0 درجه و 180 درجه است. به طور پیش فرض، آنها به ترتیب روی 544 میکرو ثانیه و 2400 میکرو ثانیه تنظیم شده اند.
Write() - به سروو فرمان می دهد که مقداری پارامتر را بپذیرد. نحو عبارت است از: servo.write(زاویه) که در آن زاویه زاویه ای است که سروو باید از آن بچرخد.
WriteMicroseconds() - فرمانی برای ارسال یک پالس با طول معین به درایو سروو می دهد؛ این یک آنالوگ سطح پایین دستور قبلی است. نحو عبارت است از: servo.writeMicroseconds(uS) که در آن uS طول پالس بر حسب میکروثانیه است.
read() - مقدار فعلی زاویه ای که سروو در آن قرار دارد را می خواند. نحو عبارت است از: servo.read() که یک مقدار صحیح بین 0 و 180 را برمی گرداند.
attached() - بررسی می کند که آیا یک متغیر به یک پین خاص متصل شده است یا خیر. نحو به شرح زیر است: servo.attached() که اگر متغیر به هر پینی متصل شده باشد، مقدار منطقی true را برمی گرداند، در غیر این صورت false.
detach() - عمل مخالف attach() را انجام می دهد، یعنی متغیر را از پینی که به آن اختصاص داده شده جدا می کند. نحو عبارت است از: servo.detach() .
همه روش های کتابخانه Servo2 مانند روش های Servo هستند.
نمونه ای از استفاده از کتابخانه Servo
به جای نتیجه گیری
درایوهای سروو متفاوت هستند، برخی بهتر هستند - برخی دیگر ارزان تر هستند، برخی قابل اعتمادتر هستند - برخی دیگر دقیق تر هستند. و قبل از خرید سروو، شایان ذکر است که ممکن است بهترین ویژگی ها را نداشته باشد، البته تا زمانی که برای پروژه شما مناسب باشد. در تلاش هایتان موفق باشید!
برای جدا کردن درایو سروو ما به یک پیچ گوشتی نیاز داریم. زیرا من در حال جدا کردن یک درایو سروو بسیار کوچک هستم، بنابراین به یک پیچ گوشتی مربوطه نیاز دارم. من شخصا از پیچ گوشتی هایی از مجموعه های ارزان قیمت چینی استفاده می کنم. من آن را در یک کیوسک در پاساژ زیرزمینی با قیمت حدود 5 دلار خریدم، بنابراین خیلی گران نیست.
برای باز کردن درایو سروو فقط باید چهار پیچ را باز کنید. آنها در پوشش پایین قرار دارند. باز کردن پیچ:

با برداشتن پوشش می توانید واحد کنترل را بررسی کنید. من وارد جزئیات نمی شوم، به هر حال آن را از اینجا حذف می کنم. همچنین می توانید موتوری را ببینید که دو سیم به آن منتهی می شود.

در بالا نیز روکشی تعبیه شده که پس از برداشتن آن می توانید دنده های گیربکس را مشاهده کنید. شایان ذکر است که دو مورد از آنها به پتانسیومتر متصل هستند - این بسیار مهم است ، زیرا برای اینکه گیربکس به عملکرد خود ادامه دهد ، باید در واقع پتانسیومتر را بشکنیم - به سادگی از آن به عنوان یک محور استفاده می کنیم. چرخ دنده ها

در واقع باید تمام دنده ها را از درایو سروو جدا کنید و برای مدتی کنار بگذارید. پتانسیومتر را بیرون می آوریم (به هر حال، این نیز است مقاومت متغیر) از محفظه با فشار دادن آرام آن از قسمت زیرین سروو با پیچ گوشتی.

اکنون در واقع لحظه بی بازگشت فرا رسیده است. البته، همیشه امکان لحیم کردن همه چیز به یکدیگر وجود خواهد داشت، اما این دشوارتر است. بنابراین - پتانسیومتر گاز می گیرد.

سپس با همین روش برد کنترل را با سیم های برق و سیگنال جدا می کنیم.

سپس سیم های موتور را گاز می گیریم. در اینجا مراقب باشید و مخاطبین را از خود موتور گاز نگیرید - اگر مطمئن نیستید، بهتر است سیم را با یک ذخیره رها کنید. سپس می توان آن را لحیم کرد. سیم را دقیقاً تا کنتاکت گاز می زنم.


بیایید یک موجودی بگیریم.

انگار همه چیز سر جای خودش است. حالا بیایید پتانسیومتر خود را برداریم.

واقعیت این است که اکنون فقط در یک زاویه خاص می چرخد. و از آنجایی که محور است و بزرگترین چرخ دنده به آن متصل است که در واقع بعداً چرخ را روی آن وصل می کنیم، باید مطمئن شویم که دائماً می چرخد. دو صفحه فلزی که از این کار جلوگیری می کند بیرون می آوریم. ما گرفتیم:

امیدوارم عکس کار من را نشان دهد. من آن را با انبردست کوچک پاره کردم، زیرا چیزی مناسب تر در دست نبود.
اکنون باید محدود کننده روی خود چرخ دنده را قطع کنید. شبیه بیرون زدگی از پایین دنده است. پیدا کردن آن آسان است، به نظر می رسد این است.

آن را برش دادیم.

و پس از آن، می توانید شروع به مونتاژ گیربکس به داخل محفظه کنید. محوری را که قبلاً از پتانسیومتر ساخته بودیم به عقب وارد می کنیم.

بعد، یک دنده در یک زمان، با کوچکترین شروع کنید. هنگام قرار دادن آخرین چرخ دنده مراقب باشید - به ویژه به محور پتانسیومتر قبلی متصل است، زیرا نوک محور به شکل یک حرف ساخته شده است. D. این برآمدگی باید در شکاف چرخ دنده قرار گیرد. به نظر می رسد چیزی شبیه به تصویر زیر است.

روکش بالایی را روی گیربکس می گذاریم تا در حین کار بیشتر از هم نپاشد.

خوب، چیز زیادی باقی نمانده است. سیم را با کانکتوری که قبلاً از تخته جدا کرده بودیم می گیریم و سیم کشی را در آن جدا می کنیم. شما نباید آنها را در فاصله طولانی از هم جدا کنید، در واقع یک سانتی متر کافی است.

ما دو تا از آنها را پاک می کنیم (اصولاً هر کدام، اما من از قرمز و سبز استفاده کردم). کافی است حدود 3 میلی متر عایق را قطع کنید. برای اهداف ما - بیش از.

سیم بدون نوار باقی مانده را به سادگی خم می کنیم تا با ما تداخل نداشته باشد.

بیایید به موضوعات داغ برویم. وقت آن است که آهن لحیم کاری را گرم کنید. در حالی که آهن لحیم کاری در حال گرم شدن بود، درایو سروو را در دسته راحت تر کردم.


اولین کاری که باید انجام دهیم این است که بقایای لحیم کاری قدیمی را که روی کنتاکت های موتور باقی مانده است، برداریم. من این کار را با استفاده از یک پمپ لحیم کاری انجام می دهم، پس از اینکه تماس با یک آهن لحیم کاری را به گونه ای گرم کردم که لحیم ذوب شود. نکته اصلی در اینجا این است که زیاده روی نکنید - جلد پشتیموتور هنوز پلاستیکی است و دوست ندارد برای مدت طولانی گرم شود. روند چیزی شبیه به این است:


من می دانم که ممکن است کاری که من انجام دادم چندان قابل توجه نباشد، اما عملاً هیچ لحیم کاری روی کنتاکت ها باقی نمانده بود، چیزی که من می خواستم.

مقالات فوق العاده ای در مورد لحیم کاری در DI HALT وجود دارد. او به نظر من عموماً یک نابغه است. به وبلاگ او پیوند دهید، در واقع چیزهای زیادی غیر از لحیم کاری وجود دارد، فقط یک جستجو کنید.
به طور خلاصه، برای اینکه یک لحیم کاری خوب بسازید، همیشه باید ابتدا لحیم قدیمی را از بین ببرید.
دو سیم برای لحیم کاری باقی مانده است. هر کسی که با لحیم کاری آشنا باشد می تواند آن را در 5 ثانیه انجام دهد. برای کسی مثل من که به طور معمول برای دومین بار در زندگی من آهن لحیم کاری را بر عهده گرفت، کمی بیشتر زمان می برد، اما هنوز - بسیار ساده است، هر کسی می تواند این کار را انجام دهد.
هنگام لحیم کاری از فلاکس استفاده می کنم که مسلماً کار را بسیار آسان می کند و کیفیت لحیم کاری با آن بسیار راحت تر تضمین می شود. من شخصاً به توصیه DI HALT قبلاً در وبلاگ او عاشق LTI-120 شدم. من آن را در یک شیشه شیک با قلم مو دارم.

چهار پیچ را محکم کنید.

این همه، اصلاح سروو تمام شده است. با وصل کردن مجدد سروو درایو راحت تر و محکم تر در دست، می توانید آزمایش را شروع کنید.

این بار من به کنترلر علاقه ای ندارم، بلکه به سادگی ولتاژ 5 ولت از منبع تغذیه را به سیم های سبز و قرمز اعمال می کنم. توجه، در ویدیو صدای بسیار بلندی از درایو وجود دارد.
همانطور که می بینید، اکنون هیچ چیز مانع از چرخش سرووی ما بدون توقف نمی شود. صدای تولید شده توسط درایو در واقع آرام نیست، اما در اصل قابل تحمل است. این احتمالاً برای امروز تمام است.
سرووها معمولاً دارای زاویه چرخش محدود 180 درجه هستند. در این مورد، ما یک سرووی "تغییر یافته" با زاویه چرخش محور نامحدود را در نظر خواهیم گرفت. 
ویژگی های عملکرد از صفحه فروشنده
اندازه: 40 * 20 * 37.5 + 5 میلی متر شفت محرک
وزن: 38 گرم
طول سیم: 320 میلی متر
سرعت: 0.19 ثانیه / 60 درجه (4.8 ولت)
0.22 ثانیه/60 درجه (6 ولت)
به احتمال زیاد سرعت ها با هم مخلوط شده اند، سروو باید 6 ولت سریعتر باشد
گشتاور: 5 کیلوگرم سانتی متر. در (4.8 V)
5.5kg.cm.at (6 V)
ولتاژ: 4.8V-6V
مجموعه تحویل استاندارد 
4 عدد صندلی گهواره ای با اشکال مختلف
4 بوش، 4 دمپر لاستیکی و 4 پیچ برای اتصال سروو
و یک پیچ کوچک دیگر برای اتصال راکر به شفت از عکس خارج شد :)
ظاهراعتماد به نفس را القا می کند، لمس نیز مشکلی ندارد، تکه های کوچک ریخته گری فقط در ناحیه گوش های نصب شده است، برچسب کمی کج است (توتوولوژی، بله!). سیم نرم است، رابط به خوبی روی پین ها قرار می گیرد. 
خب حالا کالبد شکافی:
چه کسی نمی دانست چگونه کار می کند: در مورد یک موتور، یک برد کنترل و یک مقاومت متغیر وجود دارد که بر اساس موقعیت آن سروو زاویه محور را تعیین می کند.
گیربکس این سروو پلاستیکی است، عمر مفید آن کمتر از گیربکس فلزی است و بارهای سنگین را دوست ندارد. بوش برای محور مرکزی مس یا نوعی آلیاژ است. یک بلبرینگ روی شفت خروجی وجود دارد. روان کننده ها را می توان اضافه کرد 
قسمت برقی 

مغزهایی که جهت و سرعت چرخش، سرعت متغیر و موتور الکتریکی را کنترل می کنند.
و اکنون، توجه، "هک زندگی"، چگونه یک سروو معمولی را به یک سروو چرخش ثابت تبدیل کنیم 
در نسخه اصلی، متغیر با محور خود از داخل سروو به شفت خروجی چسبانده شده است؛ در نسخه اصلاح شده، شفت گاز گرفته/شکسته شده است، ظاهراً در مرحله مونتاژ، مقاومت در موقعیت مرکزی تنظیم شده است تا شفت در حالت استراحت نمی چرخد. اگر جلوتر رفتید، می توانید آن را به طور کامل بیرون بیاندازید و با 2 مقاومت ثابت یکسان جایگزین کنید؛ قرار دادن چیزی SMD روی برد کنترل راحت است.
جمع:
سروا به عنوان سرو، نه فضا، اما نه کالای مصرفی،
می توان ارزان تر و با گیربکس فلزی پیدا کرد
PS
همانطور که در نظرات به درستی اشاره شد، کاملاً فراموش کردم که به نحوه کنترل سروو اشاره کنم؛ سروو با ولتاژ 5-6 ولت و سیگنال ppm از طریق سیم سوم تأمین می شود.
رایج ترین گزینه های کنترل:
1) برق را از یک طرف وصل کنید، از طرف دیگر خروجی را به 3 "مصرف کننده" (سرورها، موتورها و غیره) قدرت و سیگنال PPM متصل کنید، می توانید از دسته برای تنظیم سرعت و جهت چرخش سروو استفاده کنید.
2) تجهیزات RC در خروجی های گیرنده همان سیگنال ppm هستند.
3) با آردوینو هدایت کنید
ویدیو
Pps
در نتیجه "اصلاح"، سروو بازخورد خود را از دست داده است، مغز موقعیت واقعی شفت و جهت چرخش را نمی داند، اگر قصد خرید آن را دارید، این نکته را در نظر بگیرید.
در این مقاله در مورد سرووها در پروژه های آردوینو صحبت خواهیم کرد. به لطف موتورهای سروو است که پروژه های الکترونیکی معمولی تبدیل به رباتیک می شوند. اتصال سروو به پروژه آردوینو به شما امکان می دهد با حرکات دقیق به سیگنال های سنسور پاسخ دهید، به عنوان مثال، دری را باز کنید یا سنسورها را در جهت دلخواه بچرخانید. این مقاله مسائل مربوط به کنترل سرووها را مورد بحث قرار می دهد، طرح های ممکناتصال سروو به آردوینو و همچنین نمونه هایی از اسکچ ها.
سروو درایو نوعی درایو است که می تواند پارامترهای حرکت را دقیقاً کنترل کند. به عبارت دیگر، موتوری است که می تواند محور خود را در یک زاویه خاص بچرخاند یا چرخش مداوم را در یک دوره دقیق حفظ کند.
مدار عملکرد درایو سروو بر اساس استفاده از بازخورد (مدار بسته ای که در آن سیگنال های ورودی و خروجی مطابقت ندارند) است. سروو درایو می تواند هر نوع درایو مکانیکی باشد که شامل یک سنسور و یک واحد کنترل است که به طور خودکار تمام پارامترهای تنظیم شده روی سنسور را حفظ می کند. سروو درایو از یک موتور، یک سنسور موقعیت و یک سیستم کنترل تشکیل شده است. وظیفه اصلی چنین دستگاه هایی پیاده سازی در زمینه سروومکانیسم ها می باشد. همچنین سروو درایوها اغلب در زمینه هایی مانند پردازش مواد، تولید تجهیزات حمل و نقل، پردازش چوب، تولید ورق فلزی، تولید مصالح ساختمانی و غیره استفاده می شوند.
در پروژه های رباتیک آردوینو، سروو اغلب برای اقدامات مکانیکی ساده استفاده می شود:
- فاصله یاب یا سنسورهای دیگر را به یک زاویه خاص بچرخانید تا فاصله را در یک میدان دید باریک ربات اندازه گیری کنید.
- یک قدم کوچک با پای خود بردارید، اندام یا سر خود را حرکت دهید.
- برای ایجاد دستکاری های رباتیک.
- برای پیاده سازی مکانیزم فرمان.
- در، دریچه یا اشیاء دیگر را باز یا ببندید.
البته دامنه کاربرد سروو می باشد پروژه های واقعیبسیار گسترده تر است، اما مثال های ارائه شده محبوب ترین طرح ها هستند.
طرح و انواع سرووها
اصل کار درایو سروو بر اساس بازخورد یک یا چند سیگنال سیستم است. نشانگر خروجی به ورودی تغذیه می شود، جایی که مقدار آن با عمل تنظیم مقایسه می شود و اقدامات لازم انجام می شود - به عنوان مثال، موتور خاموش می شود. ساده ترین گزینه اجرا یک مقاومت متغیر است که توسط شفت کنترل می شود - هنگامی که پارامترهای مقاومت تغییر می کند، پارامترهای جریان تامین کننده موتور تغییر می کند.
در سرووهای واقعی، مکانیسم کنترل بسیار پیچیدهتر است و از تراشههای کنترلکننده داخلی استفاده میکند. بسته به نوع مکانیزم بازخورد مورد استفاده، وجود دارد آنالوگو دیجیتالسرووها اولی از چیزی شبیه به پتانسیومتر استفاده می کند، دومی از کنترلرها استفاده می کند.
 کل مدار کنترل سروو در داخل محفظه قرار دارد، سیگنال های کنترل و برق، به طور معمول، از طریق سه سیم تامین می شود: زمین، ولتاژ تغذیه و سیگنال کنترل.
کل مدار کنترل سروو در داخل محفظه قرار دارد، سیگنال های کنترل و برق، به طور معمول، از طریق سه سیم تامین می شود: زمین، ولتاژ تغذیه و سیگنال کنترل.
چرخش مداوم سروو 360، 180 و 270 درجه
دو نوع اصلی سروموتور وجود دارد - با چرخش مداوم و با زاویه ثابت (اغلب 180 یا 270 درجه). تفاوت بین چرخش محدود سروو در عناصر مکانیکی طراحی نهفته است که می تواند حرکت شفت را در خارج از زوایای مشخص شده توسط پارامترها مسدود کند. با رسیدن به زاویه 180 ، شفت بر روی محدود کننده تأثیر می گذارد و فرمان خاموش کردن موتور را می دهد. سروموتورهای چرخش پیوسته چنین محدود کننده ای ندارند.
مواد دنده سروو
برای اکثر سرووها، حلقه اتصال بین شفت و عناصر خارجی یک چرخ دنده است، بنابراین بسیار مهم است که از چه ماده ای ساخته شده است. دو گزینه مقرون به صرفه وجود دارد: چرخ دنده های فلزی یا پلاستیکی. در مدل های گران تر می توانید عناصر ساخته شده از فیبر کربن و حتی تیتانیوم را پیدا کنید.


گزینه های پلاستیکی به طور طبیعی ارزان تر، آسان تر برای تولید هستند و اغلب در سرووهای ارزان قیمت استفاده می شوند. برای پروژه های آموزشی که در آن سروو چند حرکت انجام می دهد، این مسئله مهمی نیست. اما در پروژه های جدی، استفاده از پلاستیک غیرممکن است، به دلیل سایش بسیار سریع چنین چرخ دنده هایی تحت بار.
 چرخ دنده های فلزی قابل اعتمادتر هستند، اما این، البته، هم بر قیمت و هم وزن مدل تأثیر می گذارد. تولید کنندگان صرفه جویی می توانند برخی از قطعات را پلاستیکی و برخی فلزی را بسازند، این را نیز باید در نظر داشت. و طبیعتا در ارزان ترین مدل ها حتی وجود چرخ دنده فلزی نیز تضمینی برای کیفیت نیست.
چرخ دنده های فلزی قابل اعتمادتر هستند، اما این، البته، هم بر قیمت و هم وزن مدل تأثیر می گذارد. تولید کنندگان صرفه جویی می توانند برخی از قطعات را پلاستیکی و برخی فلزی را بسازند، این را نیز باید در نظر داشت. و طبیعتا در ارزان ترین مدل ها حتی وجود چرخ دنده فلزی نیز تضمینی برای کیفیت نیست.
اگر محدودیت بودجه ندارید، چرخ دنده های تیتانیومی یا کربنی ترجیح داده می شوند. سبک و قابل اعتماد، چنین سرووها به طور گسترده ای برای ایجاد مدل های اتومبیل، هواپیماهای بدون سرنشین و هواپیما استفاده می شوند.
مزایای سروو موتورها
استفاده گسترده از درایوهای سروو به این دلیل است که عملکرد پایدار، مقاومت بالا در برابر تداخل، اندازه کوچک و طیف گسترده ای از کنترل سرعت دارند. از ویژگی های مهم سرووها توانایی افزایش توان و ارائه بازخورد اطلاعاتی است. و نتیجه این است که مدار در جهت رو به جلو یک فرستنده انرژی است و در جهت معکوس یک فرستنده اطلاعات است که برای بهبود دقت کنترل استفاده می شود.
تفاوت بین موتورهای سروو و معمولی
روشن یا خاموش کردن عادی موتور الکتریکی، ما می توانیم یک حرکت چرخشی ایجاد کنیم و چرخ ها یا سایر اجسام متصل به شفت را به حرکت در آوریم. این حرکت پیوسته خواهد بود، اما برای اینکه بفهمید شفت در چه زاویه ای چرخیده است یا چند چرخش انجام داده است، باید عناصر خارجی اضافی نصب کنید: رمزگذارها. درایو سرو از قبل حاوی همه چیزهایی است که برای به دست آوردن اطلاعات در مورد پارامترهای چرخش فعلی لازم است و زمانی که شفت به زاویه مورد نیاز می چرخد می تواند به طور مستقل خاموش شود.
تفاوت بین سروو موتور و استپر موتور
 تفاوت مهم بین سروو موتور و استپر موتور توانایی کار با شتاب های بالا و تحت بارهای متغیر است. همچنین سروو موتورها قدرت بالاتری دارند. موتورهای پله ای بازخورد ندارند، بنابراین ممکن است اثر از دست دادن مراحل مشاهده شود؛ در سروموتورها، از دست دادن پله ها مستثنی است - همه تخلفات ثبت و اصلاح می شود. با تمام این مزیت های آشکار، سروموتورها دستگاه های گران تری هستند موتورهای پله ای، اتصال و سیستم کنترل پیچیده تری دارند و نیاز به تعمیر و نگهداری واجد شرایط دارند. توجه به این نکته مهم است که موتورهای پله ای و سرووها رقبای مستقیم نیستند - هر یک از این دستگاه ها حوزه کاربرد خاص خود را دارند.
تفاوت مهم بین سروو موتور و استپر موتور توانایی کار با شتاب های بالا و تحت بارهای متغیر است. همچنین سروو موتورها قدرت بالاتری دارند. موتورهای پله ای بازخورد ندارند، بنابراین ممکن است اثر از دست دادن مراحل مشاهده شود؛ در سروموتورها، از دست دادن پله ها مستثنی است - همه تخلفات ثبت و اصلاح می شود. با تمام این مزیت های آشکار، سروموتورها دستگاه های گران تری هستند موتورهای پله ای، اتصال و سیستم کنترل پیچیده تری دارند و نیاز به تعمیر و نگهداری واجد شرایط دارند. توجه به این نکته مهم است که موتورهای پله ای و سرووها رقبای مستقیم نیستند - هر یک از این دستگاه ها حوزه کاربرد خاص خود را دارند.
سرووهای محبوب SG90، MG995، MG996 را از کجا بخریم
 مقرون به صرفه ترین گزینه سروو SG90 1.6KG مقرون به صرفه ترین گزینه سروو SG90 1.6KG
|
 سروو درایوهای SG90 و MG90S برای آردوینو با قیمت زیر 70 روبل سروو درایوهای SG90 و MG90S برای آردوینو با قیمت زیر 70 روبل
|
 گزینه دیگری برای سروو SG90 Pro 9g از یک تامین کننده قابل اعتماد در Ali گزینه دیگری برای سروو SG90 Pro 9g از یک تامین کننده قابل اعتماد در Ali
|
 Servo SG90 از تامین کننده قابل اعتماد RobotDyn Servo SG90 از تامین کننده قابل اعتماد RobotDyn
|
 تستر سروو تستر سروو
|
 چندین گزینه برای تسترهای سروو چندین گزینه برای تسترهای سروو
|
 درایو سروو محافظت شده با گشتاور 15 کیلوگرم درایو سروو محافظت شده با گشتاور 15 کیلوگرم
|
 Servo JX DC5821LV 21KG کامل ضد آب Core Gear mental 1/8 1/10 RC car Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90 Servo JX DC5821LV 21KG کامل ضد آب Core Gear mental 1/8 1/10 RC car Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90
|
 سروو MG996R MG996 سرو متال دنده برای Futaba JR سروو MG996R MG996 سرو متال دنده برای Futaba JR
|
 Servo 13KG 15KG Servos Digital MG995 MG996 MG996R Servo Metal Gear Servo 13KG 15KG Servos Digital MG995 MG996 MG996R Servo Metal Gear
|
 عامل تعیین کننده در کنترل درایوهای سروو سیگنال کنترل است که از پالس هایی با فرکانس ثابت و عرض متغیر تشکیل شده است. طول پالس یکی از مهمترین پارامترهایی است که موقعیت سروو را تعیین می کند. این طول را می توان با استفاده از روش انتخاب گوشه یا با استفاده از دستورات کتابخانه به صورت دستی در برنامه تنظیم کرد. برای هر مارک دستگاه، طول ممکن است متفاوت باشد.
عامل تعیین کننده در کنترل درایوهای سروو سیگنال کنترل است که از پالس هایی با فرکانس ثابت و عرض متغیر تشکیل شده است. طول پالس یکی از مهمترین پارامترهایی است که موقعیت سروو را تعیین می کند. این طول را می توان با استفاده از روش انتخاب گوشه یا با استفاده از دستورات کتابخانه به صورت دستی در برنامه تنظیم کرد. برای هر مارک دستگاه، طول ممکن است متفاوت باشد.
هنگامی که سیگنال وارد مدار کنترل می شود، ژنراتور پالس خود را ارائه می دهد که مدت زمان آن با استفاده از یک پتانسیومتر تعیین می شود. در قسمت دیگری از مدار، مدت زمان سیگنال اعمال شده و سیگنال از ژنراتور مقایسه می شود. اگر این سیگنال ها در مدت زمان متفاوت باشند، موتور الکتریکی روشن می شود که جهت چرخش آن مشخص می شود که کدام یک از پالس ها کوتاهتر است. هنگامی که طول پالس برابر باشد، موتور متوقف می شود.
 فرکانس استانداردی که در آن پالس ها داده می شود 50 هرتز است، یعنی 1 پالس در هر 20 میلی ثانیه. در این مقادیر، مدت زمان 1520 میکروثانیه است و سروو در موقعیت وسط قرار دارد. تغییر طول پالس منجر به چرخش درایو سروو می شود - هنگامی که مدت زمان افزایش می یابد، چرخش در جهت عقربه های ساعت است و هنگامی که کاهش می یابد، در خلاف جهت عقربه های ساعت می چرخد. محدودیتهای مدت زمان وجود دارد - در آردوینو در کتابخانه سروو، برای 0 درجه، مقدار پالس روی 544 میکرو ثانیه (حد پایین)، برای 180 درجه - 2400 میکرو ثانیه (حد بالایی) تنظیم شده است.
فرکانس استانداردی که در آن پالس ها داده می شود 50 هرتز است، یعنی 1 پالس در هر 20 میلی ثانیه. در این مقادیر، مدت زمان 1520 میکروثانیه است و سروو در موقعیت وسط قرار دارد. تغییر طول پالس منجر به چرخش درایو سروو می شود - هنگامی که مدت زمان افزایش می یابد، چرخش در جهت عقربه های ساعت است و هنگامی که کاهش می یابد، در خلاف جهت عقربه های ساعت می چرخد. محدودیتهای مدت زمان وجود دارد - در آردوینو در کتابخانه سروو، برای 0 درجه، مقدار پالس روی 544 میکرو ثانیه (حد پایین)، برای 180 درجه - 2400 میکرو ثانیه (حد بالایی) تنظیم شده است.

(تصویر استفاده شده از amperka.ru)
در نظر گرفتن این نکته مهم است که در یک دستگاه خاص، تنظیمات ممکن است کمی با مقادیر پذیرفته شده کلی متفاوت باشد. برای برخی از دستگاه ها، میانگین موقعیت و عرض پالس ممکن است 760 میکرو ثانیه باشد. تمام مقادیر پذیرفته شده نیز ممکن است به دلیل خطاهایی که ممکن است در طول تولید دستگاه رخ دهد کمی متفاوت باشد.
روش کنترل درایو اغلب به اشتباه PWM/PWM نامیده می شود، اما این کاملاً صحیح نیست. کنترل مستقیماً به طول پالس بستگی دارد؛ فرکانس وقوع آنها چندان مهم نیست. عملکرد صحیح در هر دو فرکانس 40 هرتز و 60 هرتز تضمین می شود؛ تنها کاهش یا افزایش شدید فرکانس کمک خواهد کرد. اگر کاهش شدید وجود داشته باشد، درایو سروو شروع به کار می کند، اگر فرکانس بالای 100 هرتز افزایش یابد، ممکن است دستگاه بیش از حد گرم شود. بنابراین بهتر است آن را PDM بنامیم.
بر اساس رابط داخلی، سرووهای آنالوگ و دیجیتال را می توان تشخیص داد. هیچ تفاوت خارجی وجود ندارد - همه تفاوت ها فقط در الکترونیک داخلی است. درایو سروو آنالوگ شامل یک تراشه ویژه در داخل است، در حالی که درایو سروو دیجیتال حاوی یک ریزپردازنده است که پالس ها را دریافت و تجزیه و تحلیل می کند.

هنگام دریافت سیگنال، سروو آنالوگ تصمیم می گیرد که آیا موقعیت را تغییر دهد یا خیر و در صورت لزوم سیگنالی با فرکانس 50 هرتز به موتور می دهد. در طول زمان واکنش (20 میلی ثانیه)، تأثیرات خارجی ممکن است رخ دهد که موقعیت درایو سروو را تغییر دهد و دستگاه زمانی برای واکنش نخواهد داشت. درایو سروو دیجیتال از پردازنده ای استفاده می کند که سیگنال ها را با فرکانس بالاتر - از 200 هرتز - تامین و پردازش می کند، بنابراین می تواند سریعتر به تأثیرات خارجی پاسخ دهد و به سرعت سرعت و گشتاور مورد نظر را ایجاد کند. بنابراین سروو دیجیتال بهتر می تواند موقعیت تنظیم شده را حفظ کند. در عین حال، درایوهای سروو دیجیتال برای کار کردن به برق بیشتری نیاز دارند که هزینه آنها را افزایش می دهد. پیچیدگی تولید آنها نیز سهم زیادی در قیمت دارد. هزینه بالا تنها اشکال سرووهای دیجیتال است؛ از نظر فنی، آنها بسیار بهتر از دستگاه های آنالوگ هستند.
اتصال سروو موتور به آردوینو
سروو درایو دارای سه کنتاکت است که در رنگ های مختلف رنگ آمیزی شده اند. سیم قهوه ای به زمین، سیم قرمز به منبع تغذیه +5 ولت و سیم نارنجی یا زرد به سیم سیگنال منتهی می شود. این دستگاه به روشی که در شکل نشان داده شده است از طریق تخته نان برد به آردوینو متصل می شود. سیم نارنجی (سیگنال) به پین دیجیتال، سیم مشکی و قرمز به ترتیب به زمین و برق وصل می شود. برای کنترل سروو موتور، نیازی به اتصال خاص به پین های شیم ندارید - ما قبلاً اصل کنترل سروو را شرح داده ایم.
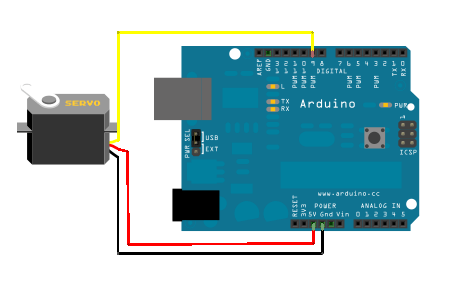
اتصال مستقیم سرووهای قدرتمند به برد توصیه نمی شود زیرا... آنها جریانی را برای مدار برق آردوینو ایجاد می کنند که با زندگی سازگار نیست - اگر حفاظت کار کند خوش شانس خواهید بود. اغلب علائم اضافه بار و منبع تغذیه نامناسب سروو عبارتند از "تکان دادن" سروو، صدای ناخوشایند و راه اندازی مجدد برد. برای تغذیه بهتر است از منابع خارجی استفاده کنید، حتما زمین های دو مدار را با هم ترکیب کنید.
طرحی برای کنترل سروو در آردوینو
کنترل مستقیم سروو با تغییر مدت زمان پالس در طرح یک کار نسبتاً بی اهمیت است، اما خوشبختانه ما یک کتابخانه سروو عالی داریم که در محیط توسعه آردوینو تعبیه شده است. ما در مقاله ای جداگانه تمام تفاوت های ظریف برنامه نویسی و کار با سرووها را در نظر خواهیم گرفت. در اینجا خواهیم داد ساده ترین مثالبا استفاده از سروو
الگوریتم عملیات ساده است:
- ابتدا Servo.h را وصل می کنیم
- یک شی از کلاس Servo ایجاد کنید
- در بلوک راه اندازی نشان می دهیم که سروو به کدام پین متصل است
- ما از متدهای شی به روش معمول C++ استفاده می کنیم. محبوب ترین روش نوشتن است، که ما یک مقدار صحیح را بر حسب درجه ارائه می کنیم (برای یک سروو 360 این مقادیر متفاوت تفسیر می شوند).
نمونه ای از یک طرح ساده برای کار با درایو سروو
نمونه ای از پروژه ای که در آن ابتدا سروو موتور را روی زاویه صفر قرار می دهیم و سپس آن را 90 درجه می چرخانیم.
#عبارتند از
طرح برای دو سروو
و در این مثال ما همزمان با دو سروو کار می کنیم:
#عبارتند از
سروو کنترل با استفاده از پتانسیومتر
در این مثال، بسته به مقدار دریافتی از پتانسیومتر، سروو را می چرخانیم. مقدار را می خوانیم و با استفاده از تابع نقشه آن را به زاویه تبدیل می کنیم:
//بخشی از نمونه استاندارد استفاده از حلقه void کتابخانه Servo() ( val = analogRead(A0)؛ // مقدار را از پینی که پتانسیومتر به آن متصل شده است بخوانید val = map(val, 0, 1023, 0, 180)؛ // تبدیل عدد در محدوده 0 تا 1023 به محدوده جدید - از 0 تا 180. servo.write(val); delay(15)؛ )

مشخصات و اتصال SG-90
اگر قصد خرید ارزان ترین و ساده ترین درایو سروو را دارید، SG 90 بهترین گزینه خواهد بود.این سروو اغلب برای کنترل مکانیزم های کوچک و سبک وزن با زاویه چرخش از 0 تا 180 درجه استفاده می شود.
مشخصات SG90:
- سرعت اجرای دستور 0.12s/60 درجه;
- برق 4.8 ولت؛
- دمای عملیاتی از -30 تا 60 درجه سانتیگراد؛
- ابعاد 3.2 x 1.2 x 3 سانتی متر;
- وزن 9 گرم
توضیحات SG90
رنگ سیم استاندارد است. سروو درایو ارزان است و تنظیمات دقیقی را برای موقعیت های شروع و پایان ارائه نمی دهد. برای جلوگیری از اضافه بارهای غیرضروری و صدای ترق مشخصه در حالت 0 و 180 درجه، بهتر است نقاط افراطی را در 10 درجه و 170 درجه تنظیم کنید. هنگام کار با دستگاه، نظارت بر ولتاژ تغذیه بسیار مهم است. اگر این نشانگر تا حد زیادی بیش از حد برآورد شود، ممکن است عناصر مکانیکی مکانیزم های دنده آسیب ببینند.
سروو درایوهای MG995 و MG996 tower pro
سروو MG995 دومین مدل سروو محبوب است که اغلب به پروژه های آردوینو متصل می شود. اینها سروو موتورهای نسبتاً ارزانی هستند که عملکرد بسیار بهتری نسبت به SG90 دارند.
مشخصات MG995
شفت خروجی در MG995 120 درجه (60 درجه در هر جهت) می چرخد، اگرچه بسیاری از فروشندگان 180 درجه را نشان می دهند. این دستگاه در یک جعبه پلاستیکی قرار گرفته است.
- وزن 55 گرم;
- گشتاور 8.5 کیلوگرم x سانتی متر;
- سرعت 0.2 ثانیه / 60 درجه (در 4.8 ولت)؛
- توان کاری 4.8 - 7.2 ولت؛
- دمای عملیاتی - از 0 تا -55 درجه سانتیگراد.
توضیحات MG995
اتصال به آردوینو نیز از طریق سه سیم انجام می شود. اصولاً برای پروژه های آماتور می توان MG995 را مستقیماً به آردوینو وصل کرد، اما جریان موتور همیشه بار خطرناکی روی ورودی های برد ایجاد می کند، بنابراین همچنان توصیه می شود سروو را جداگانه تغذیه کنید و اتصال زمین را فراموش نکنید. از هر دو مدار قدرت گزینه دیگری که زندگی را آسان می کند استفاده از سروو کنترلرها و شیلدهای آماده است که در مقاله ای جداگانه به بررسی آن ها خواهیم پرداخت.
MG996R از نظر مشخصات مشابه MG995 است، فقط در یک قاب فلزی عرضه می شود.
تبدیل سروو درایو به سروو چرخش پیوسته
همانطور که در بالا توضیح داده شد، سروو توسط پالس های عرض متغیر کنترل می شود که زاویه چرخش را تنظیم می کند. موقعیت فعلی از پتانسیومتر خوانده می شود. اگر شفت و پتانسیومتر را جدا کنید، سروموتور موقعیت لغزش پتانسیومتر را مانند نقطه وسط می گیرد. همه این اقدامات منجر به حذف خواهد شد بازخورد. این به شما امکان می دهد سرعت و جهت چرخش را از طریق سیم سیگنال کنترل کنید و یک سروو چرخش مداوم ایجاد کنید. توجه به این نکته حائز اهمیت است که یک سروو با چرخش ثابت نمی تواند در یک زاویه خاص بچرخد و تعداد دورهای مشخصی را انجام دهد.
برای انجام مراحل فوق، باید دستگاه را جدا کرده و تغییراتی در طراحی ایجاد کنید.
در Arduino IDE باید یک طرح کوچک ایجاد کنید که راکر را در موقعیت وسط قرار دهد.
#عبارتند از
پس از این، دستگاه باید به آردوینو متصل شود. با اتصال، سروو شروع به چرخش می کند. باید با تنظیم مقاومت به توقف کامل آن رسید. پس از توقف چرخش، باید شفت را پیدا کنید، عنصر انعطاف پذیر را از آن بیرون بکشید و آن را دوباره نصب کنید.
این روش دارای چندین معایب است - تنظیم مقاومت در حالت توقف کامل ناپایدار است؛ با کوچکترین ضربه / گرمایش / خنک کننده، نقطه صفر تنظیم شده ممکن است از بین برود. بنابراین بهتر است از روش تعویض پتانسیومتر با تریمر استفاده کنید. برای انجام این کار، باید پتانسیومتر را بردارید و آن را با یک مقاومت صاف کننده با همان مقاومت جایگزین کنید. نقطه صفر باید با استفاده از طرح کالیبراسیون تنظیم شود.
هر روشی برای تبدیل سروو به سروو چرخش پیوسته دارای اشکالاتی است. اولاً، تنظیم نقطه صفر دشوار است؛ هر حرکتی می تواند آن را از بین ببرد. ثانیا، محدوده کنترل کوچک است - با یک تغییر کوچک در عرض پالس، سرعت می تواند به طور قابل توجهی تغییر کند. شما می توانید محدوده را به صورت برنامه نویسی در آردوینو افزایش دهید.
نتیجه
سرووها در بسیاری از پروژه های آردوینو، از روباتیک گرفته تا سیستم های خانه هوشمند، نقش بسیار مهمی دارند. همه چیز مربوط به حرکت به طور سنتی نیاز به دانش خاصی دارد و ایجاد یک درایو کامل و با عملکرد مناسب کار آسانی نیست. اما با کمک سروو موتورها می توان کار را در بسیاری از موارد ساده کرد، به همین دلیل است که سروو به طور مداوم حتی در پروژه های سطح اولیه استفاده می شود.
در این مقاله سعی کردیم به جنبه های مختلف استفاده از سرووها در پروژه های آردوینو بپردازیم: از اتصال تا نوشتن اسکچ. با انتخاب ساده ترین مدل سروو (مثلا sg 90)، می توانید به راحتی مثال های داده شده را تکرار کنید و اولین پروژه های خود را ایجاد کنید که در آن چیزی حرکت می کند و تغییر می کند. امیدواریم این مقاله به شما در این امر کمک کند.

